





Auch wenn nicht Pneutronic draufsteht, steckt in einigen Schweizer Maschinen Pneutronic drin – Technologiekompetenz, die im Kern den Unterschied macht.
Pneutronic unterstützt mehrere Maschinenbauer bei der Entwicklung skalierbarer Steuerungsarchitekturen auf Basis von Beckhoff TwinCAT. Unser objektorientiertes Framework bildet die Grundlage für robuste, wiederverwendbare und langfristig wartbare Software — optimiert für modulare Maschinenkonzepte und industrielle Serienplattformen. Pneutronic liefert hierfür ein objektorientiertes Steuerungsframework, das in mehreren Industriebereichen erprobt ist und eine saubere Trennung von Funktionen, Zuständigkeiten und Lebenszyklen sicherstellt.
Lifecycle-Management für SPS-Software
Der Lifecycle von SPS-Software entscheidet heute massgeblich über die Wettbewerbsfähigkeit einer Maschinenplattform. Steuerungssoftware ist kein einmaliges Entwicklungsprodukt, sondern ein langfristiges Asset mit kontinuierlichen Pflege- und Erweiterungsanforderungen. Eine stabile Architektur stellt sicher, dass Maschinen über viele Jahre stabil, updatefähig und erweiterbar bleiben.
Klare Schnittstellen und Hierarchien
Aktuelle Code-Generatoren und KI-Tools wie TwinCAT CoAgent generieren funktionsfähige Bausteine, scheitern jedoch an Architekturfragen. Die Kernprobleme liegen nicht bei der Syntax, sondern in der Steuerungslogik: heterogene Feldbus-Topologien, Interoperabilität von Informationsmodellen, deterministische State-Machines, Interfacing zwischen Modulen sowie das Prozessverständnis der Maschine.
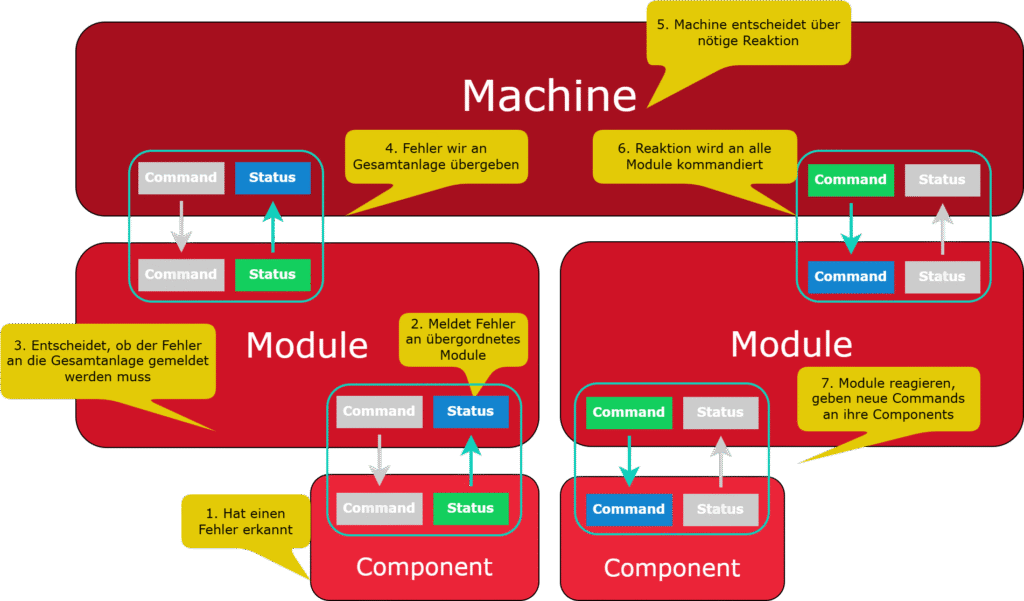
Im Fehlerfall eskaliert die Komponente an ihr Modul. Das Modul bewertet den Kontext, triggert gegebenenfalls Corrective Actions oder eskaliert weiter zur Machine-Instanz. Auf oberster Ebene werden anlagenweite Reaktionen orchestriert und konsistent an Module und Komponenten zurückdelegiert.
State Machine und Transitionen für eindeutige Zustände
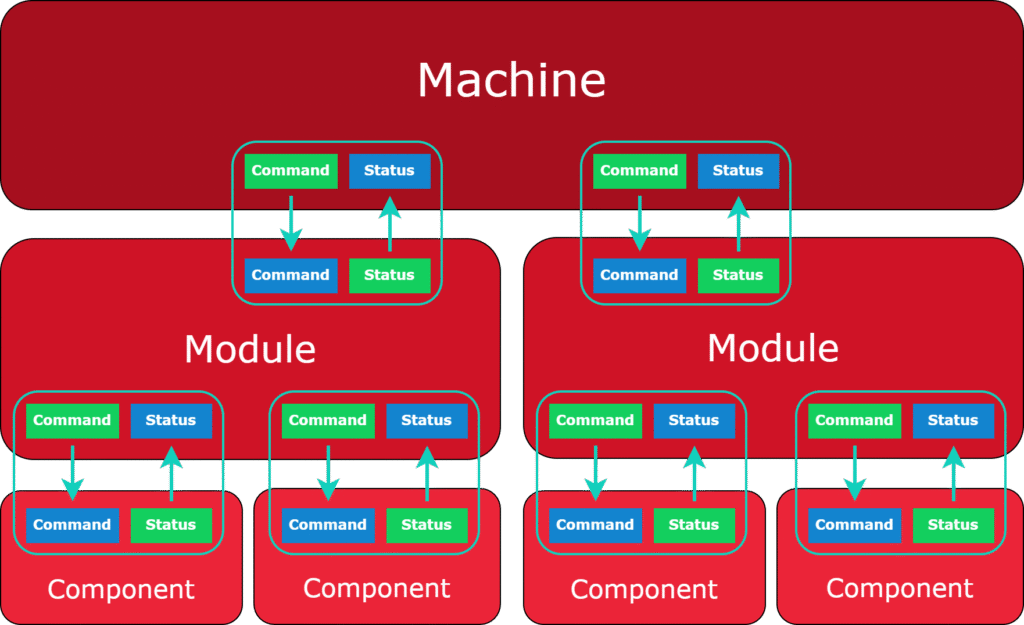
Die Lösung ist eine strikt hierarchisierte Struktur:
- Die Gesamtanlage bildet die Top-Level-Instanz.
- Darunter folgen Equipment-Module mit klar definierten Verantwortlichkeiten.
- Die Module orchestrieren ihre zugehörigen Komponenten.
Schnittstellen werden über standardisierte Interfaces modelliert. Globale Variablen, VAR_INOUT-Missbrauch oder direkte Speicherzugriffe werden eliminiert. Jedes Objekt kommuniziert ausschliesslich über definierte Kommunikationspfade.
Commanding und Statusmeldungen basieren auf harmonisierten State-Machines. Jede Komponente nutzt einen Grundstock an States und Transitionen, welche bei Bedarf überladen werden können.
Fit für zukünftige Automatisierung
Durch die saubere Architektur ist die Maschine optimal vorbereitet für KI-basierte Engineering-Workflows, Simulation, digitale Zwillinge und automatisiertes Testen. Eine konsistente Softwarestruktur wird zum Skalierungsfaktor — für Entwicklungszeit, Qualität und Lifecycle-Kosten.


